Defining Next-Gen Motion Control
Proven Robotic Actuators
Built to Fit Your Design
Industry-tested actuators for humanoids, quadrupeds and next-generation robotic systems.










Many Actuator Technologies
One Platform
Different applications demand different drive architectures. We build them all — and engineer them to fit the robot you're building.
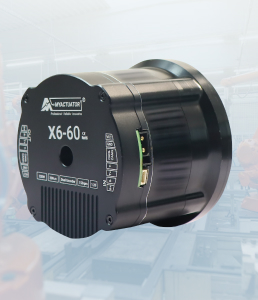
High torque planetary actuators designed for robotics, quadrupeds and industrial automation.
Explore RMD X SeriesHigh torque planetary actuators designed for robotics, quadrupeds and industrial automation.
Explore Rotary ActuatorsCompact harmonic mini actuators for lightweight robotic systems.
Explore Linear ActuatorsZero-backlash harmonic motors for precision robotics.
Explore Telescopic ActuatorsCycloidal actuators for industrial automation and heavy-duty robotics.
Explore Controllers & DrivesHigh precision direct drive motors with ultra-low latency control.
Explore SensorsLow profile direct drive motors engineered for compact robotic systems.
Explore AccessoriesFrameless motors designed for integrated robotic assemblies and precision motion systems.
Explore Partner ProductsNeed a Custom Solution?
Don't Change Your Robot.
We Change the Actuator.
Your mechanical design stays intact. We configure the actuator to fit — custom mounting interfaces, gear ratios, hollow shaft dimensions, winding specs, connector layouts.
Integration Resources
Everything You Need
to Integrate
Documentation, SDKs, CAD files and robotics integration resources designed to accelerate development and deployment.
CAD Downloads
STEP, SolidWorks and Fusion360 models for faster hardware integration.
Developer SDK
Control libraries, APIs and communication examples for robotics systems.
ROS Packages
Ready-to-use ROS integration packages for rapid deployment.
Technical Docs
Datasheets, wiring diagrams and actuator integration manuals.
Application fit
Built for the Robots That Matter Right Now
Every next-generation robotic platform, from humanoid workers to industrial automation systems, needs actuators that are reliable, adaptable and engineered for precision.
High torque-to-weight joints for next-generation humanoid platforms.
RMD-X planetary for general joints
RH harmonic for precision arms
Custom configurations for unique limb geometries
Real-time CAN communication